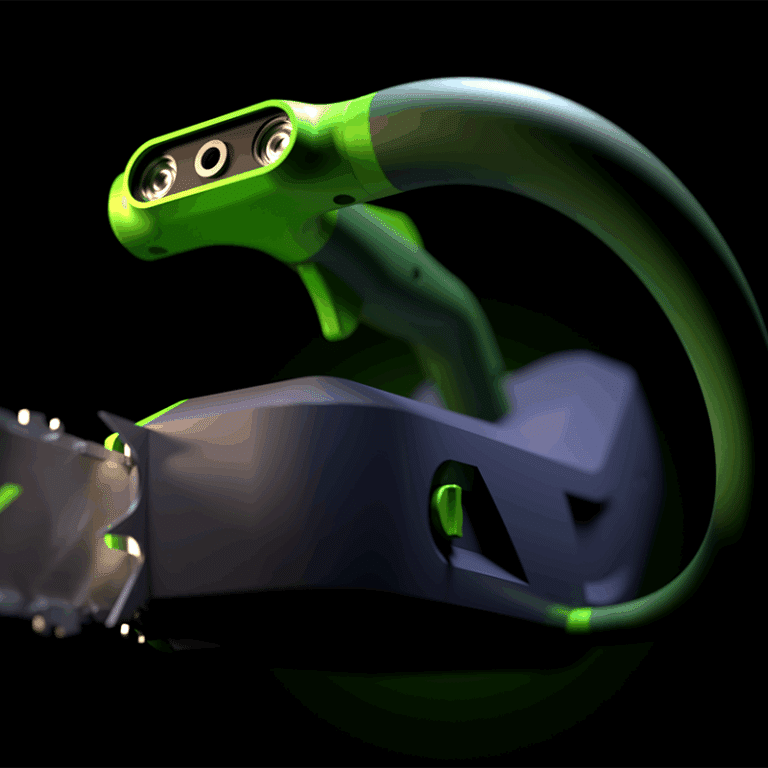
ASENTRY is a top-handle arborist chainsaw designed to actively prevent injury through intelligent, non-passive safety systems. It acknowledges the realities of canopy work: a space where productivity, danger, and human nature go hand in hand. Five interconnected safety technologies create a robust protective net that responds to risk without compromising realistic professional workflow.
Two years ago, my high school best friend was working as an arborist climber. While five metres up in a tree, he lost stability, and his arm came down onto his top-handle chainsaw. He sustained a life-altering injury that almost cost him his arm. When I spoke with him afterward, it was immediately clear a design problem existed in the space. That incident became the foundation of my capstone project where I strove to answer the question:
How can I use emerging technology to develop a non-passive safety solution to improve chainsaw safety?
Research
Literature Review
Existing literature takes for granted the danger of chainsaws, choosing instead to explore factors such as environment, education, training, personal protective equipment (PPE), and cognitive dynamics of chainsaw users. Whilst there is something to be said for the advancement of chainsaw safety through development of these topics, they neglect to frame the tool itself as the root cause.
Product Benchmarking
The chainsaw market exhibits a low level of diversity when it comes to safety features. Innovations are highly diffused. Unfortunately, the systems which are found across the market, such as the kickback lever, are dated and offer protection that is too situational.
Stakeholder Interviews
Five, hour-long interviews were conducted with professional users. I found a clear gap between prescribed techniques and real-world practices. Each participant had their own interpretation of how to balance safety and productivity. This is a product of the challenging environment of working in the tree canopy, and the need to adapt to the tool, rather than have the tool adapt to the user.
Experience is everything
If you don’t get the right
experience straight up then you
won’t get the experience because
you’ll probably end up dead.
Participant 2
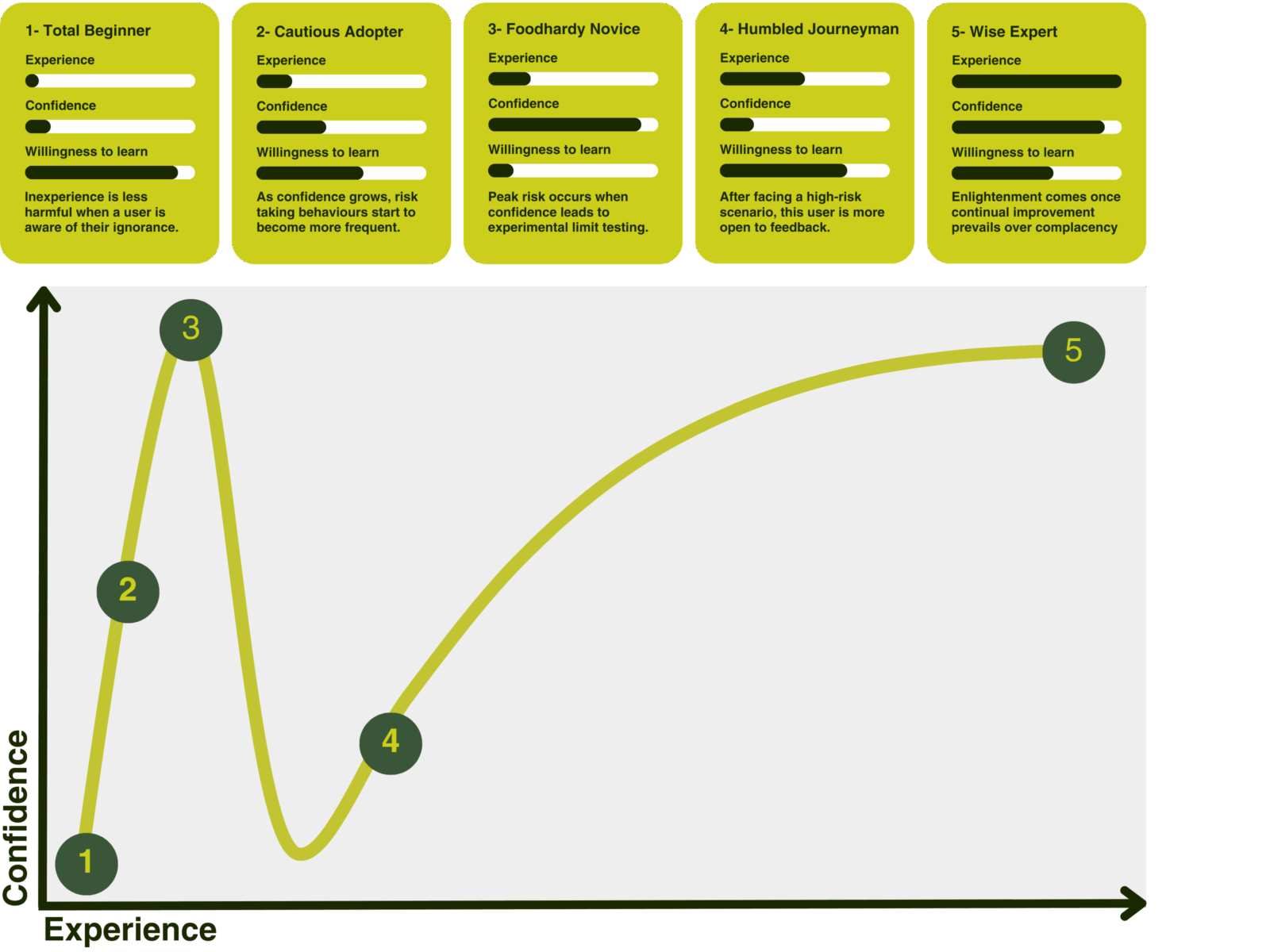
Working with trees demands an intimate understanding of their niche tree behaviours and characteristics- knowledge that accumulates over years of experience. As a result, new entrants to the industry face heightened risk. In arboriculture, being qualified and being capable are not always the same thing. This is a critical problem space. The research also suggested that overconfidence plays a large role in risk-taking behaviour amongst the user group. My purpose was not to stamp out risk-taking behaviour, but to embrace these human tendencies and acknowledge imperfection.
Critical Scenario
Unwritten rules of use evolve beyond the guidelines of user manuals, as arborists continually balance productivity with safety in highly individual ways. Where existing chainsaws avoid engaging with these usage patterns, ASENTRY embraces them. A critical taboo that drove the design process was using the chainsaw with one hand to control limbs as they drop. Every participant cited it as a necessity for meeting productivity demands, but brands turn a blind eye to this.
Every single decent climbing
arborist who wants to
get the job done by the end of the
day is one handing a saw.
Participant 3
(Top-handle saws) are more or less
designed to be used with one
hand. I probably shouldn’t say
that, but that is why I’ve got
one.
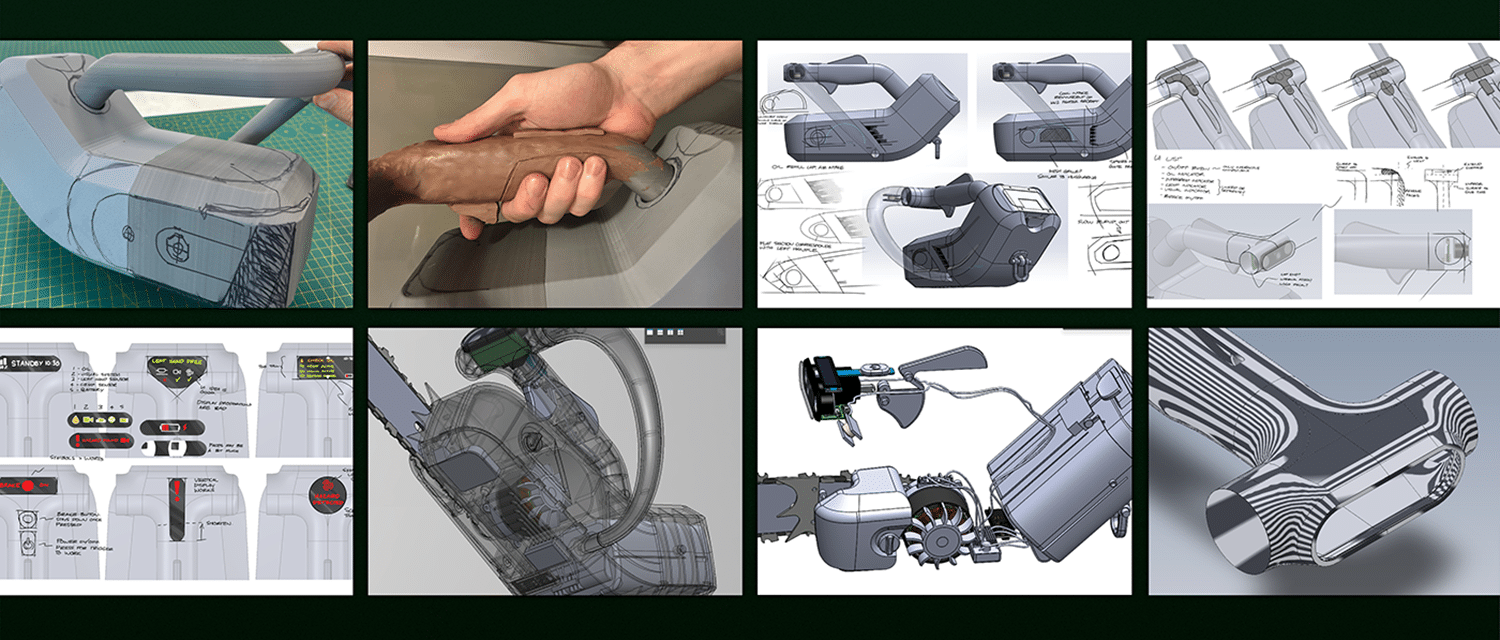
The bar is charged with a weak field that monitors conductivity in a 25cm radius. If a person enters the zone, it cuts power instantly. Unlike cameras, it works even when branches obscure visibility. This emerging technology has been conceptually tested for handheld circular saws, but it cannot act alone as this use case is dynamic and harder to produce event classifications for.
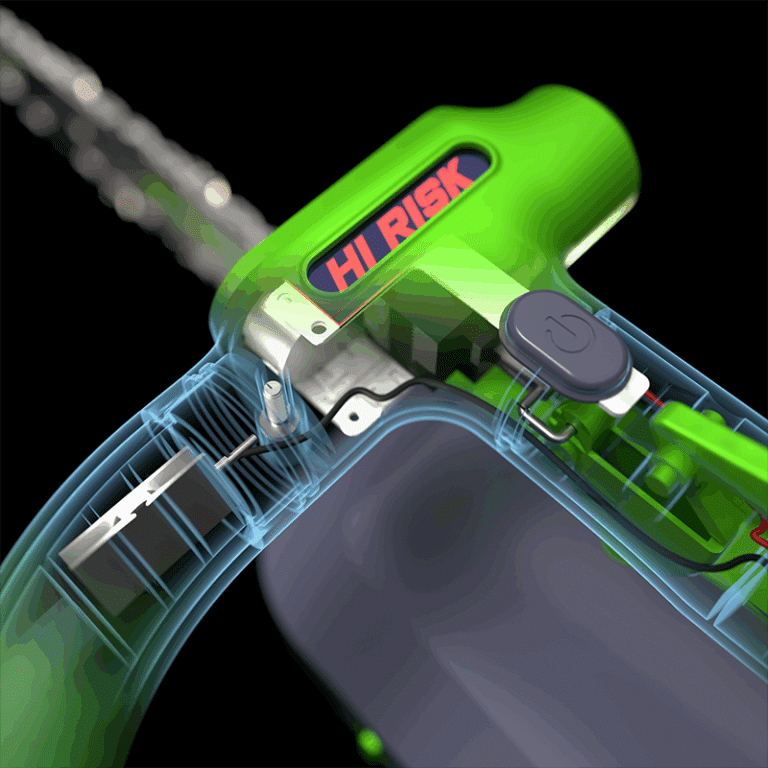
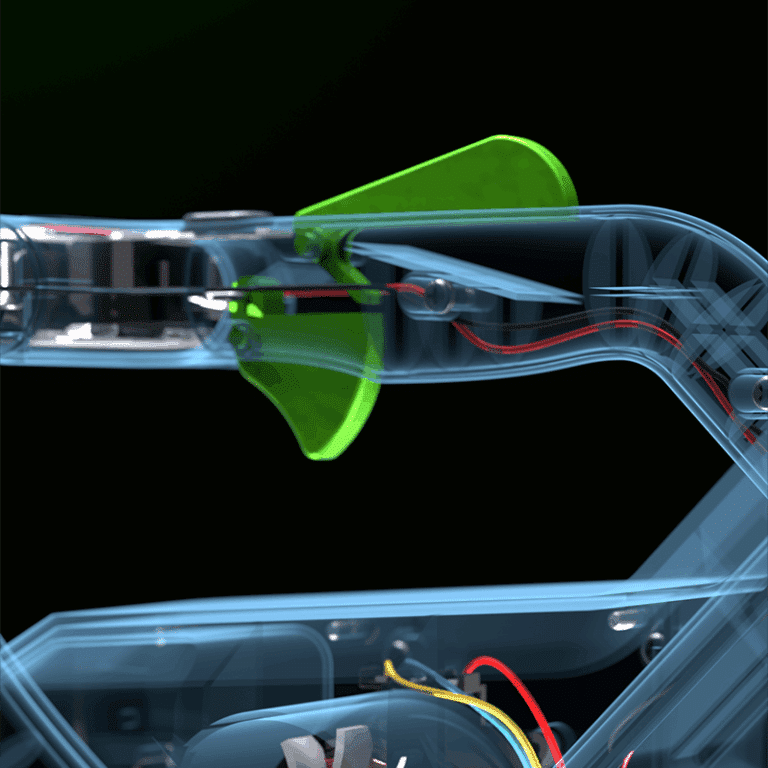
Load Cell Sandwich
Built into the left handle, this tiny sensor measures pressure to detect one-handed use. If the left hand leaves the tool, Asentry shifts into high-risk mode, ready to intervene. It even modulates power draw to extend battery life- something users told me was critical. With this, the data pool expands to understand how the tool is being used at any given moment.
Infrared Camera
This rugged unit identifies hazards near the bar and doubles as a work light for night work, which is another common use case. It corroborates the data from the electromagnetic system, reducing false positives. The aluminium housing protects this assembly from being damaged from rough handling.
Deadman Switch
A familiar but vital mechanical safeguard. The trigger won’t activate unless pressed in sequence, preventing accidental input. The nearby power button creates a short window of opportunity for use, conserving power while idle.
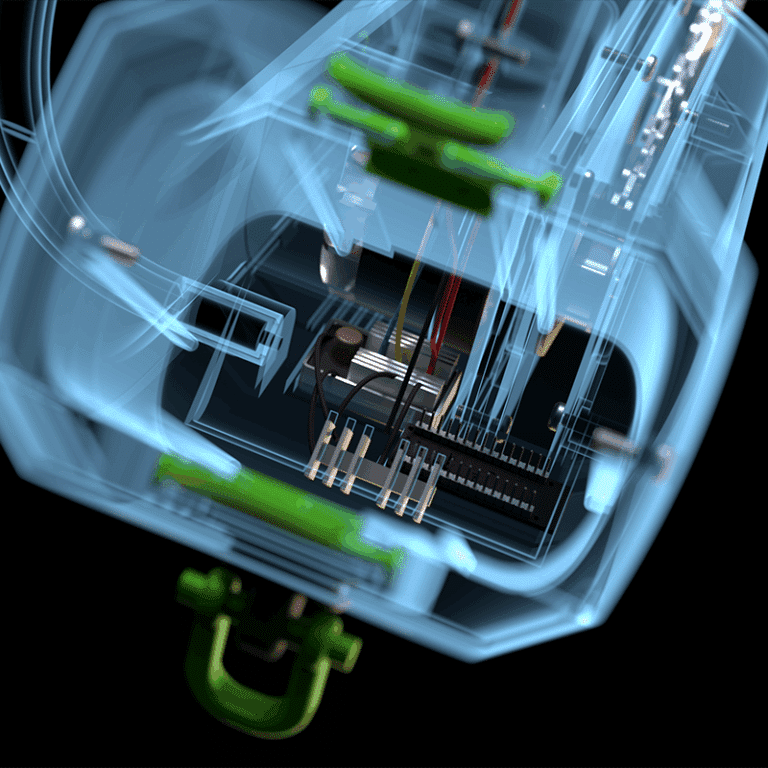
Embedded AI Processing
Inside, an Arduino Nano running TinyML interprets motion data from the chips onboard sensors. It replaces the crude inertia brake by actively tracking tool position and detecting blind spots. The system adds redundancy to visual and field data.
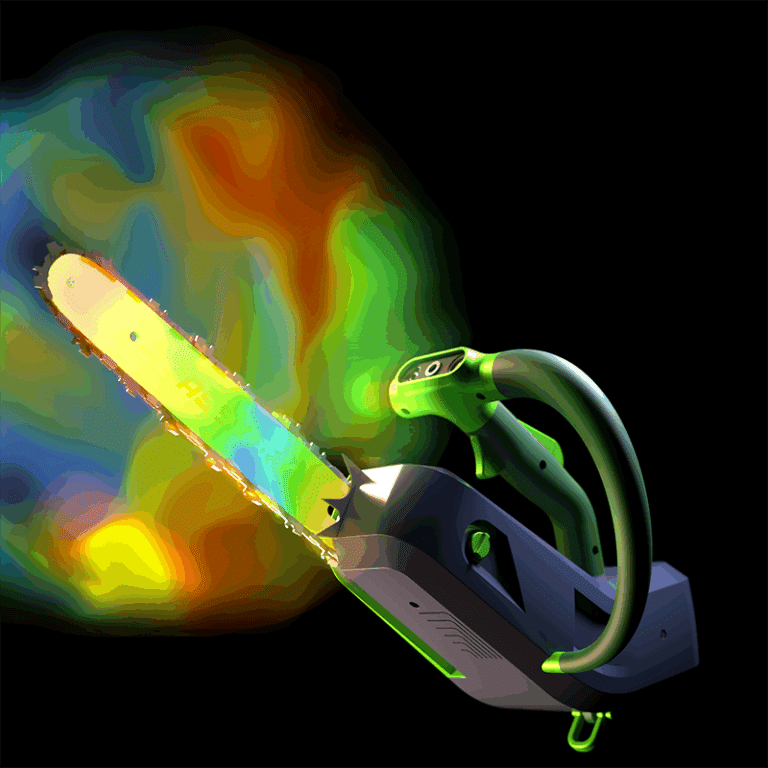
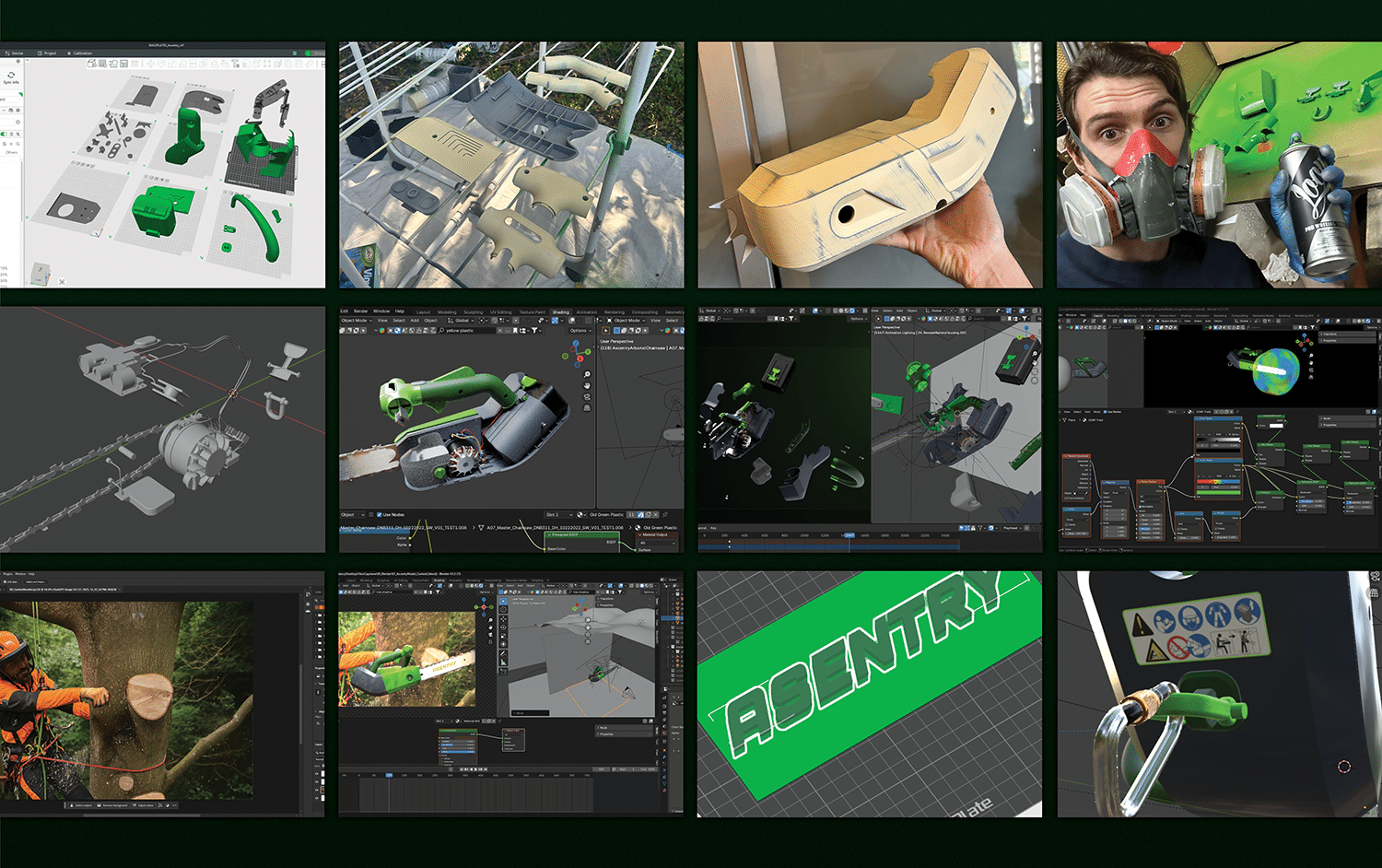
rENDERING AND aNIMATION
I had the opportunity to hone my animation skills during a six month internship with BMW Group in Munich, Germany. Using skills I developed there, I developed a short animation of the product and stylistic renders to convey the emerging technology which is critical to the concept. I chose blender because I believe it is better suited for generating abstract effects, such as what is seem with the CEMF rainbow box texture I made- inspired by physics simulations from the paper which tested this technology in circular saws.
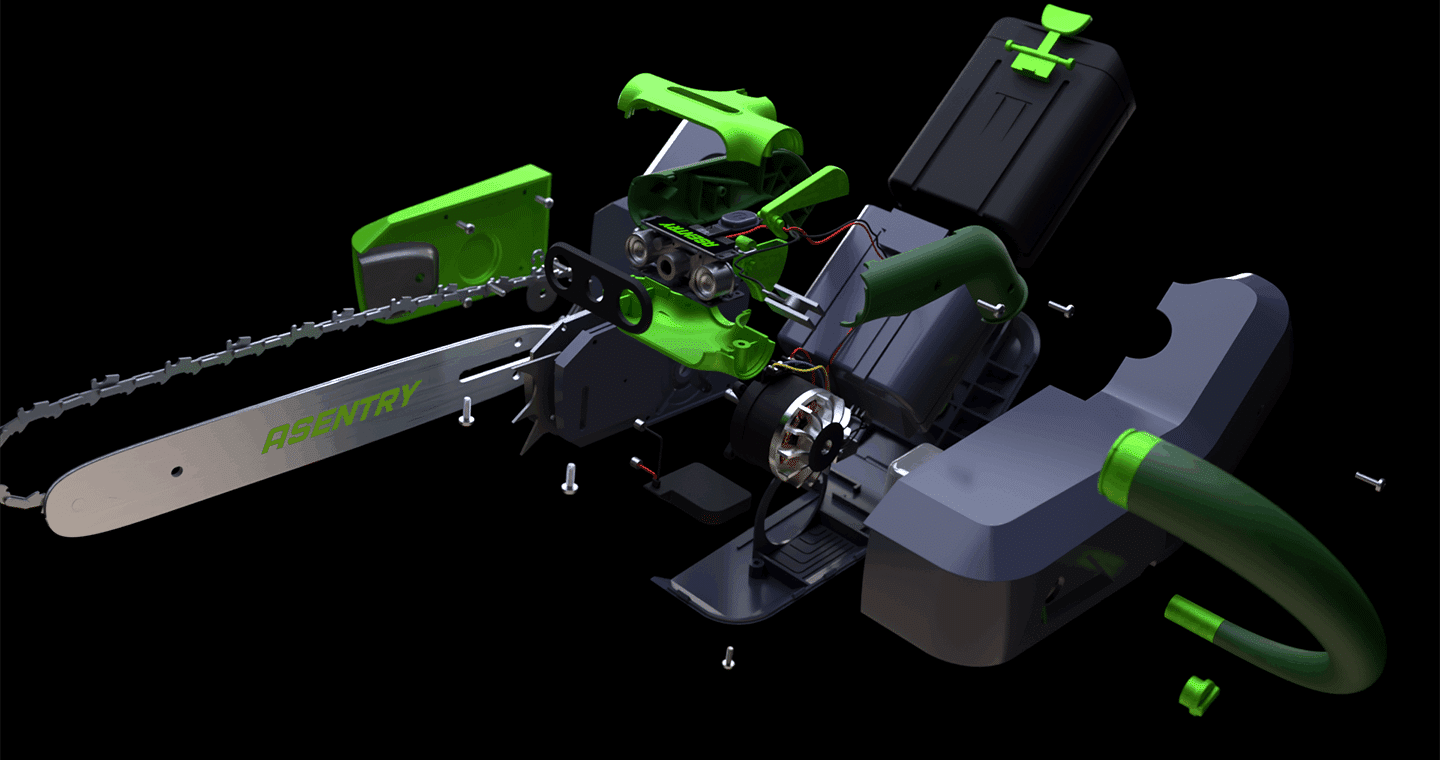
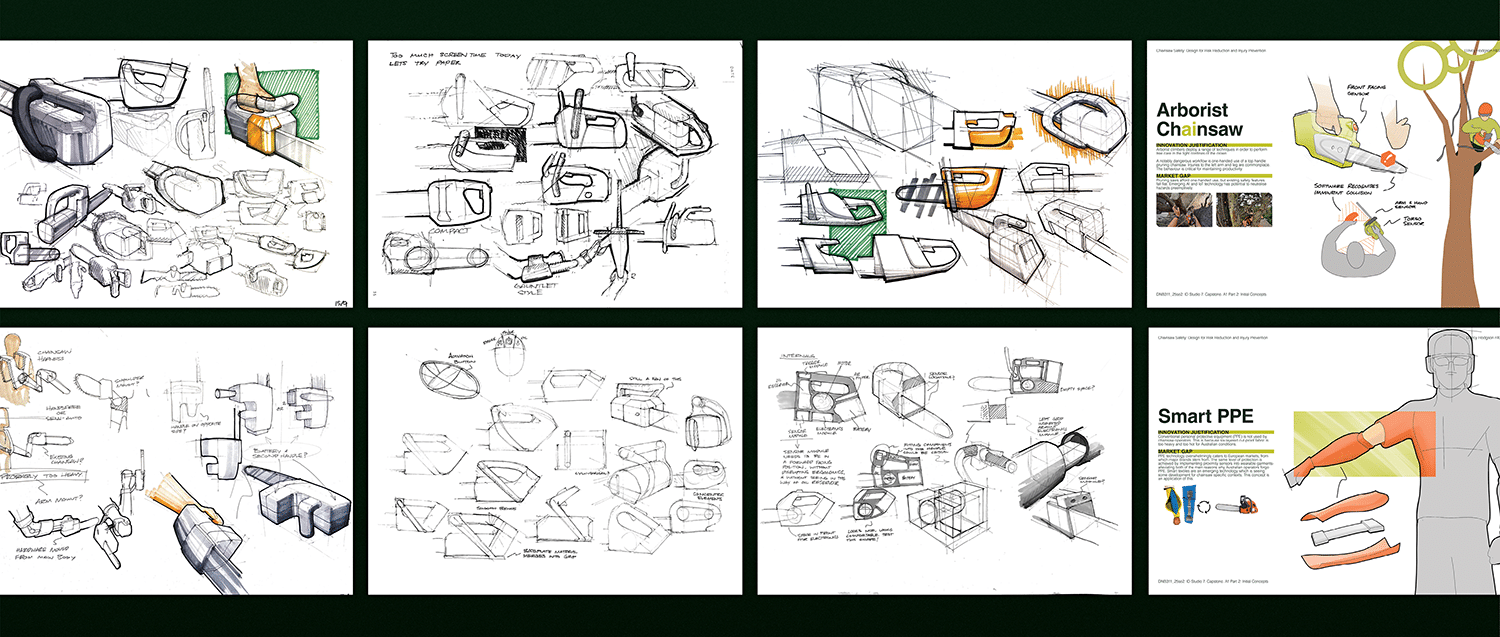
Design Process
I used a hybrid top-down and bottom-up approach to create ASENTRY. The BLDC motor, drive sprocket assembly, trigger assembly, and STIHL AP300s battery system set some important constraints which the monolithic form was built around. After I had laid out these parts, I prioritised aesthetics and refined the minimalist design language with surfacing features in Solidworks. A full-scale prototype, and sacrificial marketplace chainsaw were really useful in helping me judge proportions in this phase. I then worked smaller internal components into the gaps. Ergonomic features demanded more extensive physical prototyping. I used modelling clay and a series of 3d printed handle variants to refine these features. Design for manufacture was considered throughout the entire design process, as maintenance is important to chainsaw safety- demanding a thoughtful approach to design for disassembly. Crowning and ribs strengthen the shell components, which are made from 3mm thick ABS. My Solidworks assembly contains 73 parts in total.
The physical prototype accurately depicts the form and weight (5kg) of the product. The prototype is made primarily from PLA, but utilises a real chainsaw bar and blade. Post processing of parts involved using automotive primer filler and loop spray paints. It utilises some real fastening features, adapted in some places to suit 3D print tolerances. 6Gx12mm screws support fastenings, and the 10mm flange nut on the sprocket cover reflects real chainsaw assembly tropes. The deadman trigger mechanism is functional. Details were simplified beneath the sprocket cover. In some places, fastening features were removed to allow for 3d print optimisation. Here, adhesive was used to strengthen the prototype.
D'Arcy Hodgson is a future-focused industrial designer with practical experience in design for manufacture and international exposure within globally structured corporate environments. His multidisciplinary background fuels a love for hands-on prototyping, while his interest in speculative design drives the visionary, forward-thinking approach that defines much of his digtial work.