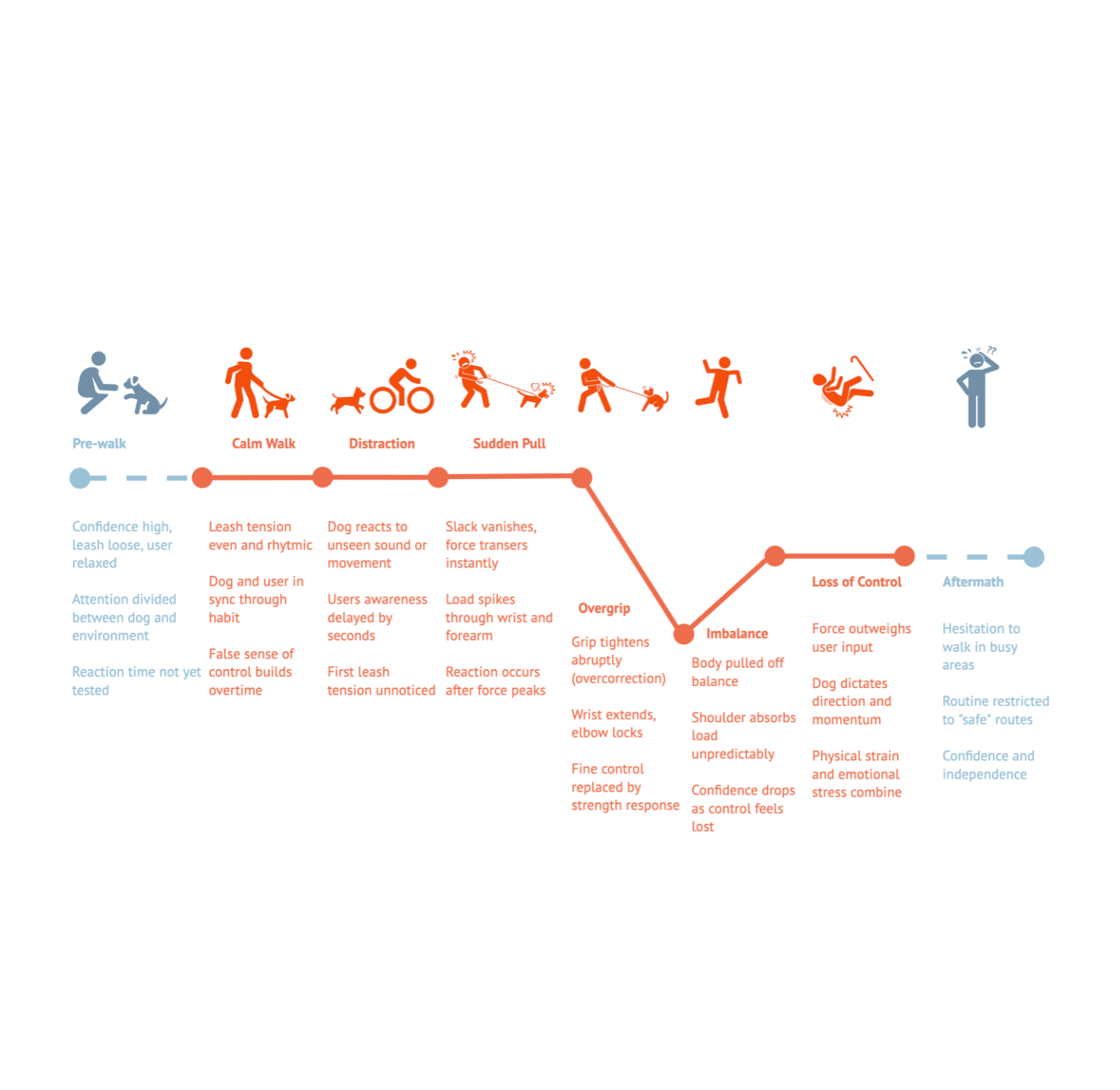
The problem
Dog walking often seems instinctive, yet for many older or assisted users, it becomes an unpredictable negotiation between control and reaction. A sudden pull can strain joints, disrupt balance, and destroy confidence, gradually turning a daily routine into a cautious task. The challenge is not just physical strength but the ability to anticipate and respond before control is lost. When the leash reacts faster than the user, safety, comfort, and independence are compromised, exposing a problem that design has often overlooked.
RESEARCH QUESTION
This early understanding of the problem and the experiences behind it led to a defining question, one that shaped the direction of my research and design.
How can design restore confidence and empower older or assisted users by reducing moments of imbalance and physical strain during everyday dog walking?
RESEARCH AND INSIGHTS
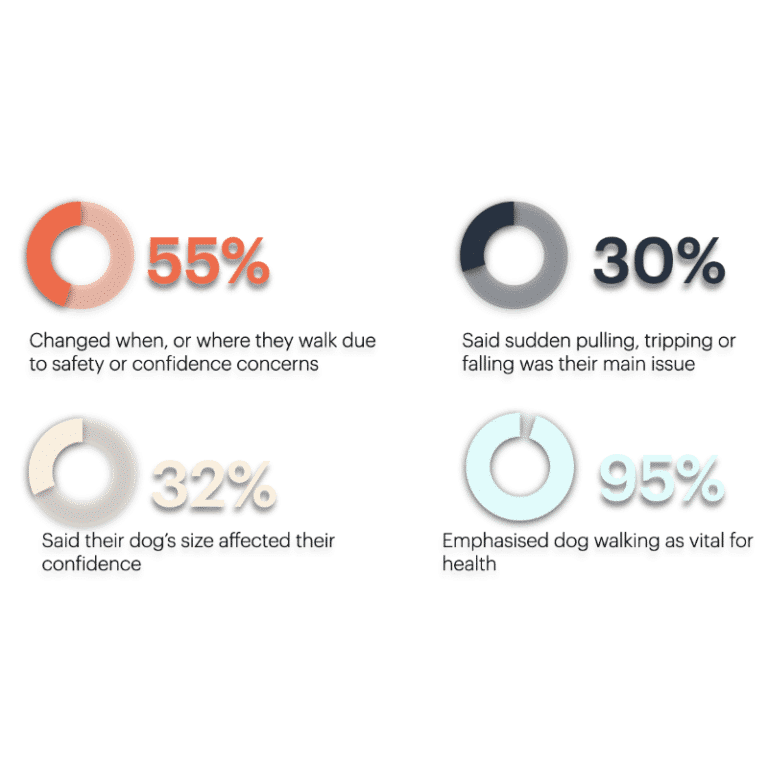
Research combined surveys, interviews and real-world observation to better understand the challenges of everyday dog walking. Surveys captured broad behavioural trends among regular dog owners, while a semi-structured interview with a user who had previously experienced injuries during dog walking and a structured interview with a professional dog walker offered detailed, contrasting perspectives. A series of observations at local dog parks provided real-time insight into user behaviour and environmental factors, forming a strong foundation for the following research outcomes.
You dont see the risks until its too late
Semi-structured interview with regular dog walker, queensland, 2025
We don’t start the walk until all dogs are calm
DOG WALKING PROFESSIONAL, QUEENSLAND, 2025
Instead of resisting, she released the leash entirely
personal observation at local dog park, queensland, 2025
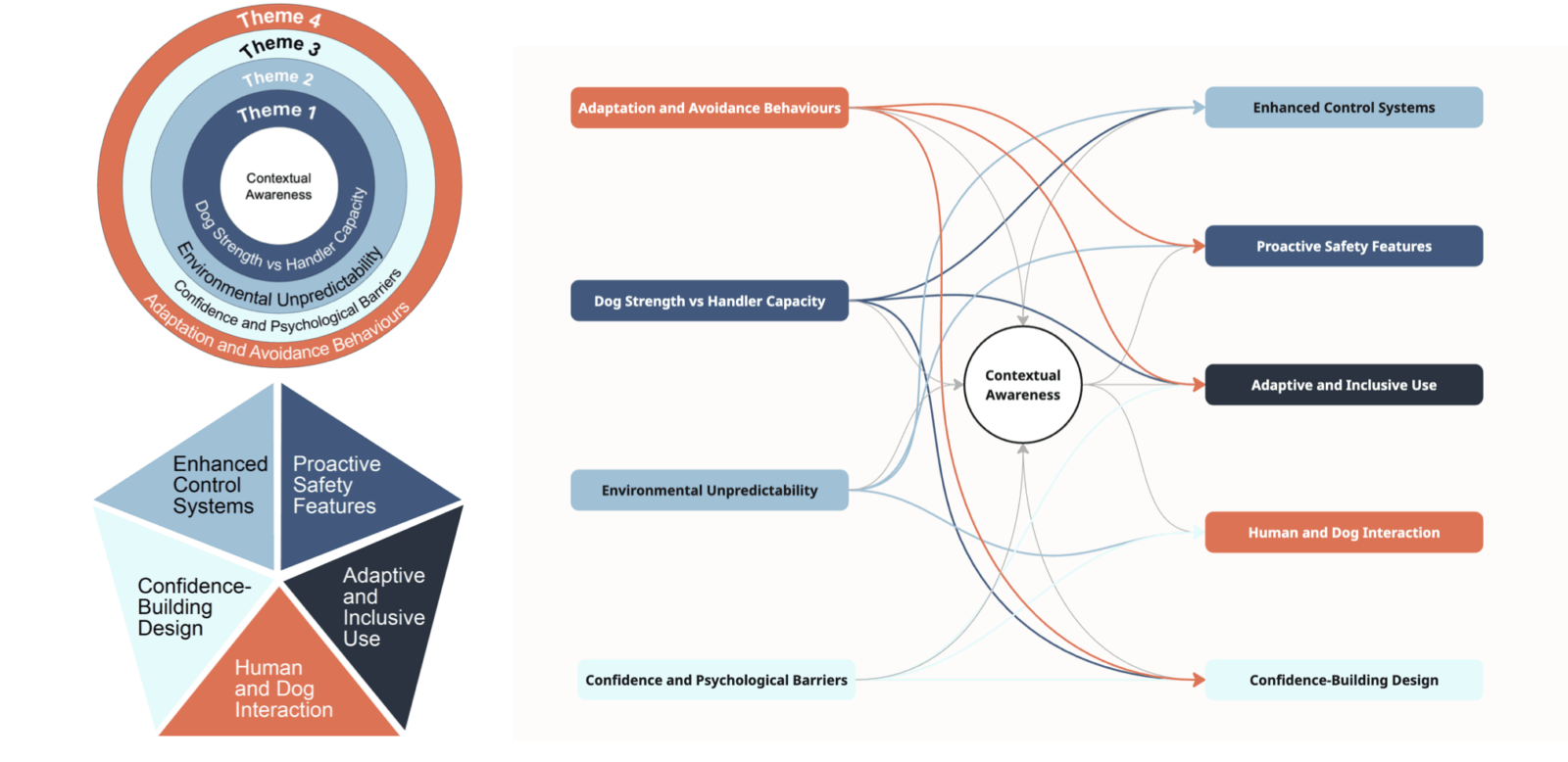
Translating Research Themes into Design Opportunities
The four recurring themes revealed the layered nature of control loss in dog walking, from physical strength imbalance to environmental unpredictability and psychological response. At the centre lies contextual awareness, connecting each theme through anticipation and reaction. These insights directly informed five design implications that prioritise safety, adaptability, confidence, and intuitive human-dog interaction, forming the foundation of the design outcome.
Take a closer look, the full report is just below:
- Name
- RESEARCH REPORT – WALKING WITH CONFIDENCE
- File Type
- application
- File Size
- 1 MB
- Link
- Download File
from ideation to final design
DESIGN APPROACH
The development of Reacta followed a structured yet adaptive design process, moving from early ideation sketches to refined prototypes and final assembly. Each stage focused on improving control, ergonomics, and mechanical response through iterative testing and refinement. After every stage, insights led back to the drawing board, re-sketching, reshaping, and re-evaluating ideas until a balanced, resolved final design emerged.
-
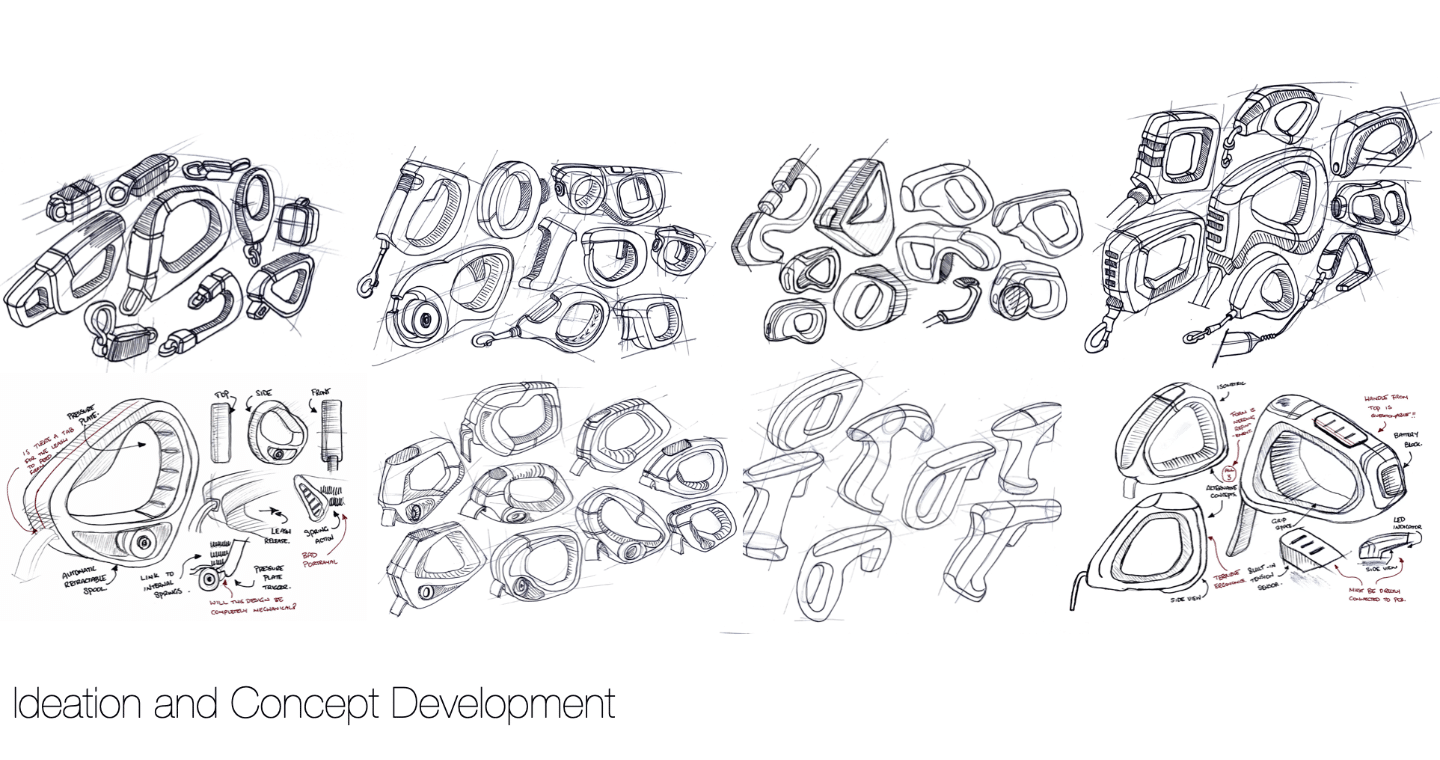
Ideation and Concept Development
A series of sketches explored ergonomic handles and control systems across the design journey. Balancing intuitive grip with mechanical function was key. Through continuous iteration, ideas evolved toward a compact, trigger-integrated form, establishing the foundation for both usability and internal mechanical layout.
-
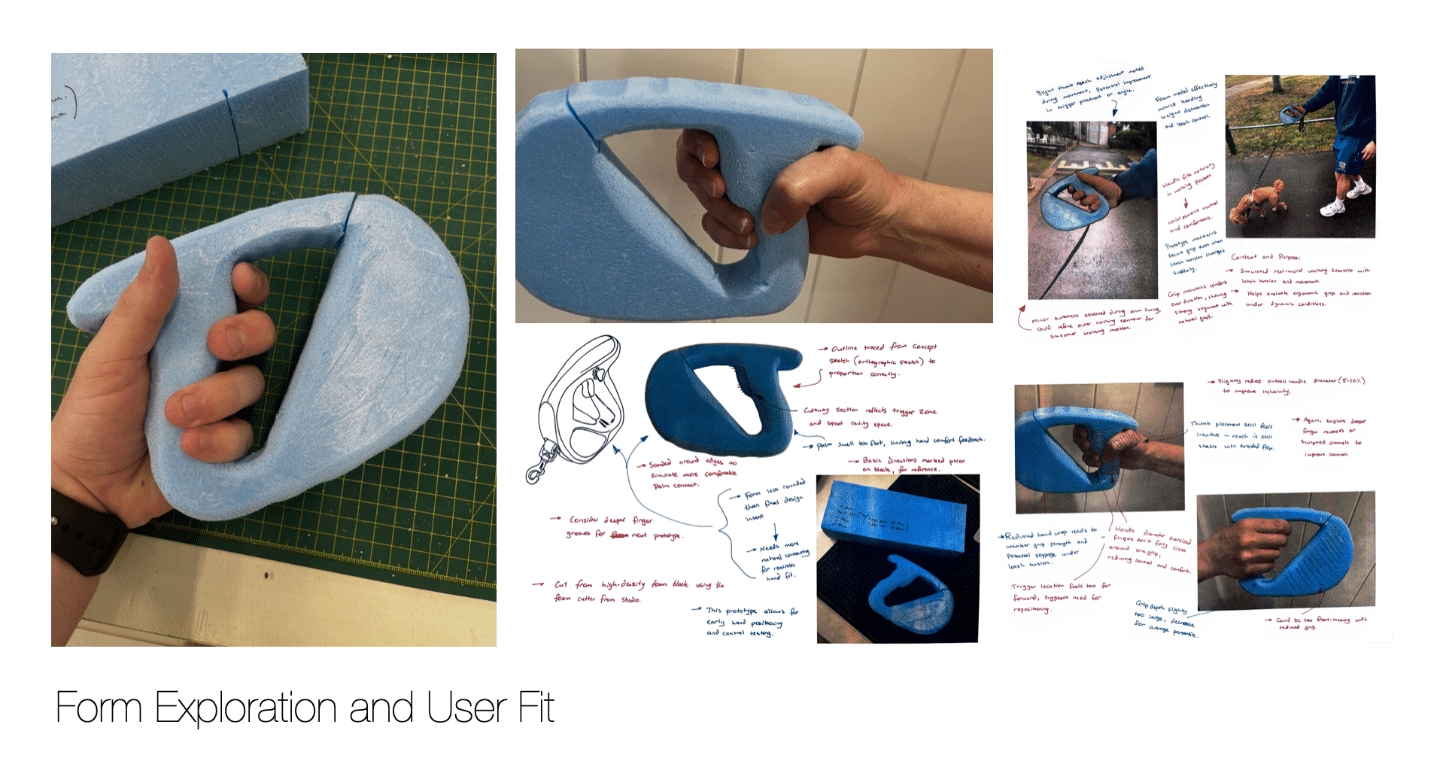
Form Exploration and User Fit
Foam prototypes tested size, curvature, and natural hand placement. Finding a comfortable grip for weaker wrists led to the contoured top fin supporting the thenar web. These models validated comfort, balance and control through real walking scenarios and informed ergonomic refinements.
-
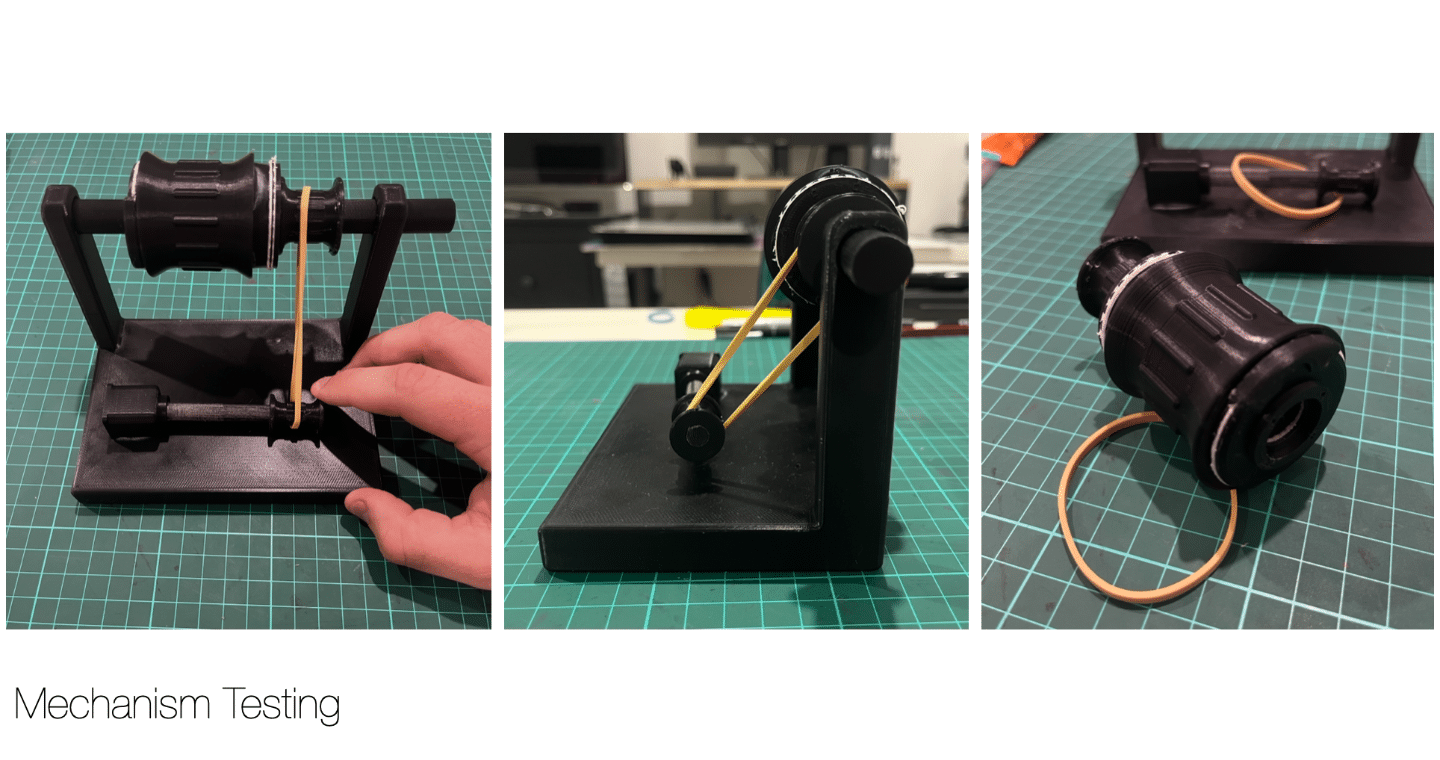
Mechanism Testing
Simplified test rigs simulated pulley motion and tension control using rubber bands as the driving belt and multiple bands as the leash. With no access to custom PCB, testing relied on physical rotation. This confirmed the torque behaviour and reassured the two-mode damping concept.
-
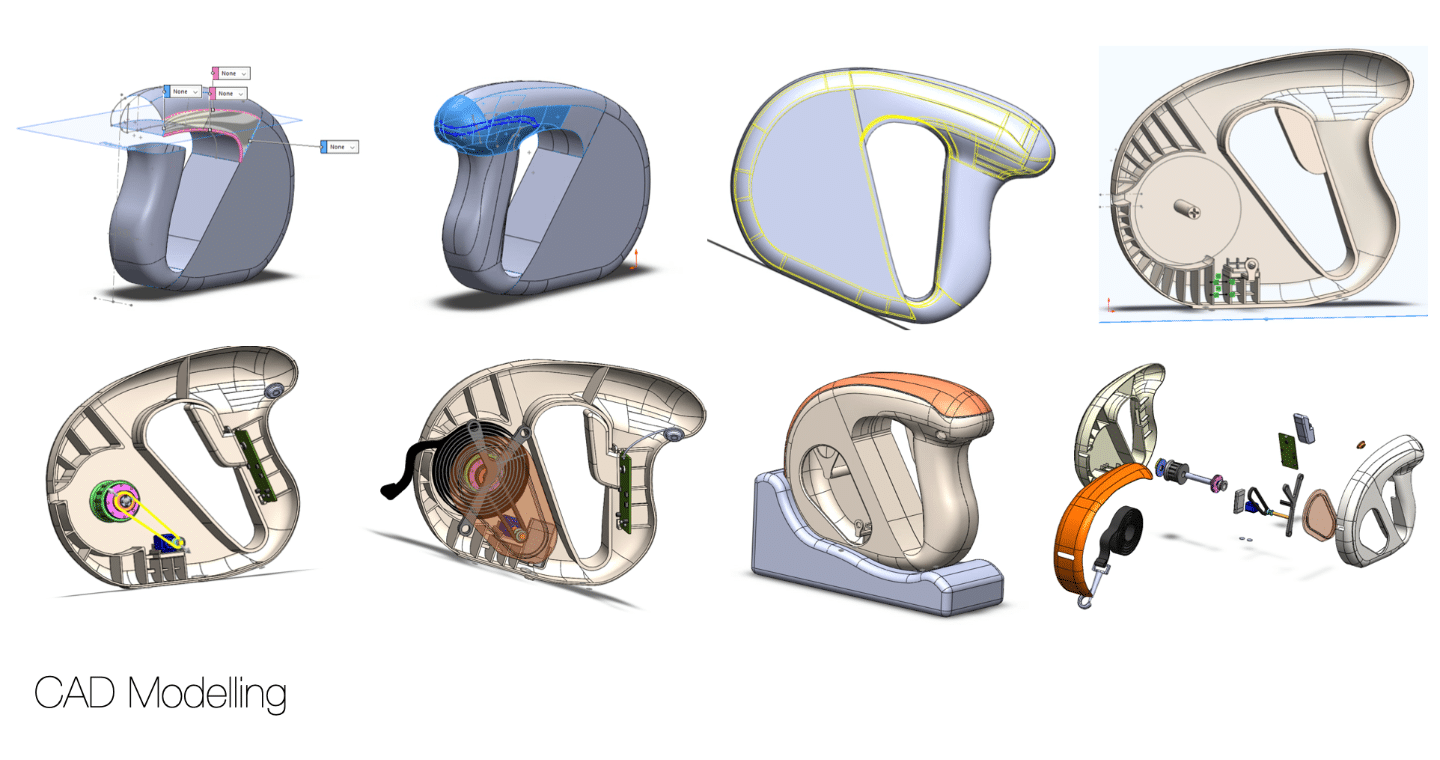
CAD Modelling
SolidWorks surface modelling refined both form and function. Extensive time was spent correcting surface irregularities through curvature and zebra stripes evaluations. The assembly was constructed around compact internal layouts, mapping space for wiring and micro-components before re-sketching underlays to optimise fit and impact durability.
-
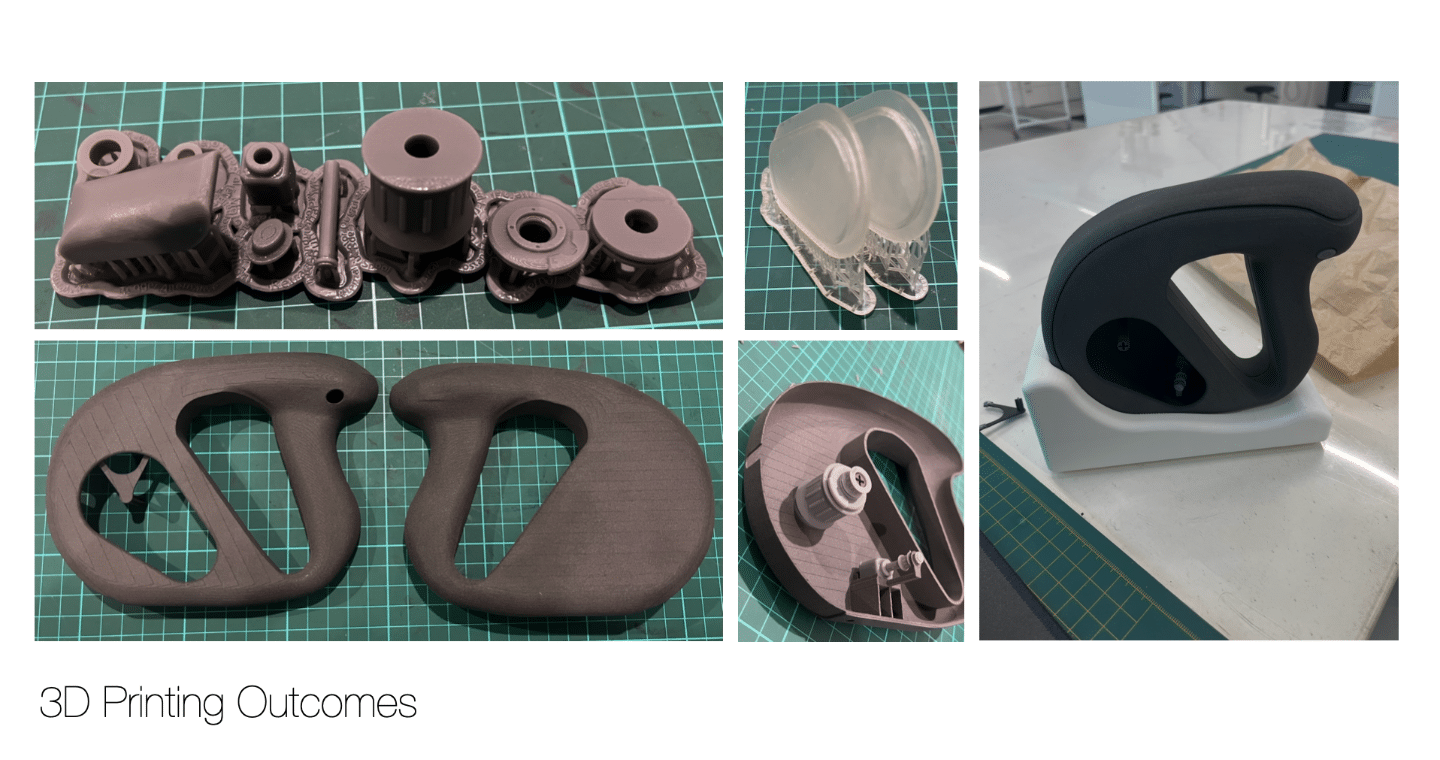
3D Printing Outcomes
Internal parts were printed in grey resin for precision and detail. The shell was in nylon for strength and flexibility. Two shells were produced, an initial draft revealed poor joining tolerance and thin internal walls, leading to add lip and groove feature and reprinting for structural improvement.
-
Assembly and Refinement
All parts were sanded progressively from 120 to 1200 grit, with the shell receiving automotive filler primer at 400 grit for extreme surface levelling and adhesion. The transparent cover was wet-sanded and polished, achieving a clear, refined surface for a clear view of the mechanism.
-
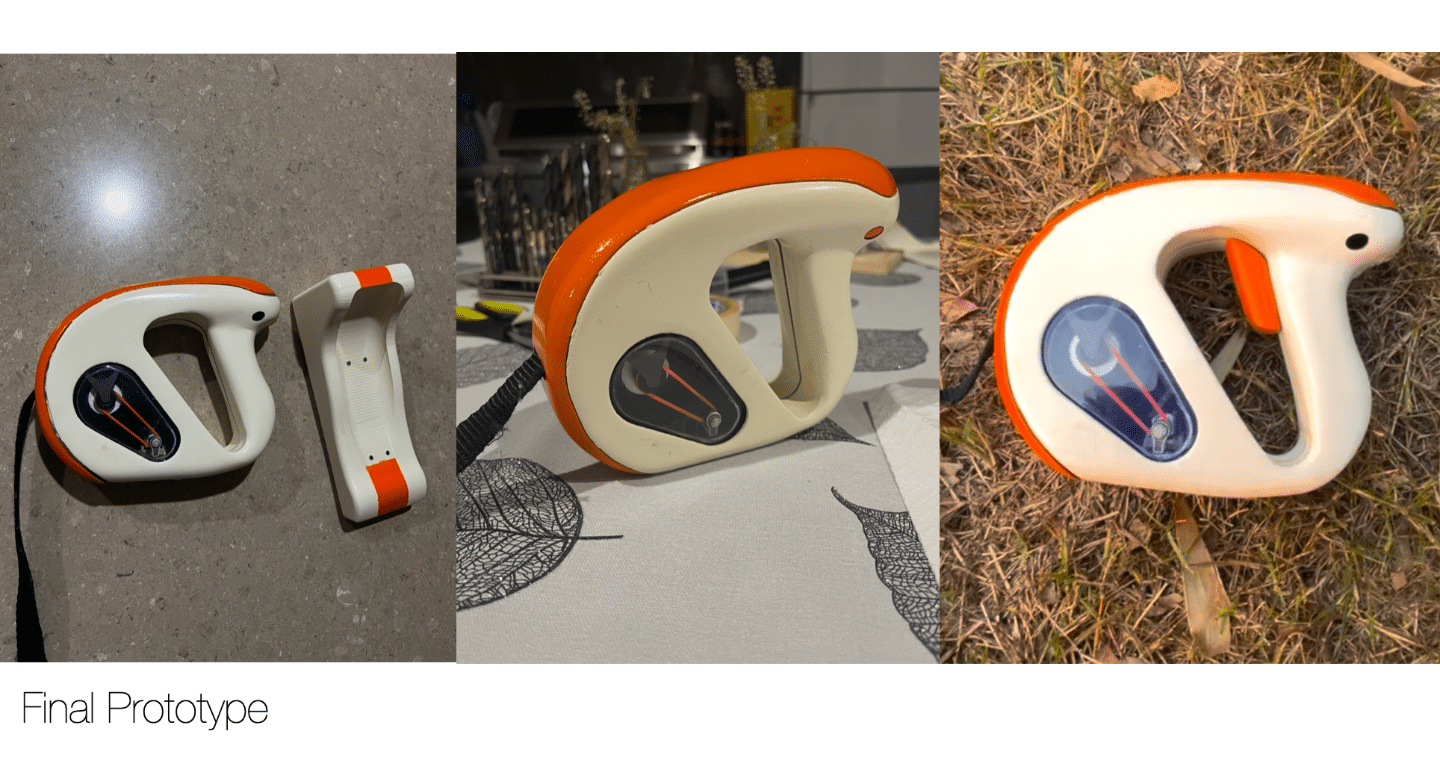
Final Prototype
The final model substitutes nylon for HDPE and grey resin for aluminium, using a rubber band as the driving belt. The result captures Reacta’s intended ergonomics and mechanical response, forming a precise, realistic representation of the envisioned design.
meet reacta
Reacta isn’t just a leash handle; it’s a response. Designed for the split-second moments that catch you off guard, it reacts before you have to. Every curve, mechanism, and motion is built to absorb tension, protect the wrist, and restore balance when control is lost. It transforms uncertainty into confidence, letting users walk with ease, awareness and trust, even when the unpredictable happens.
key features
-
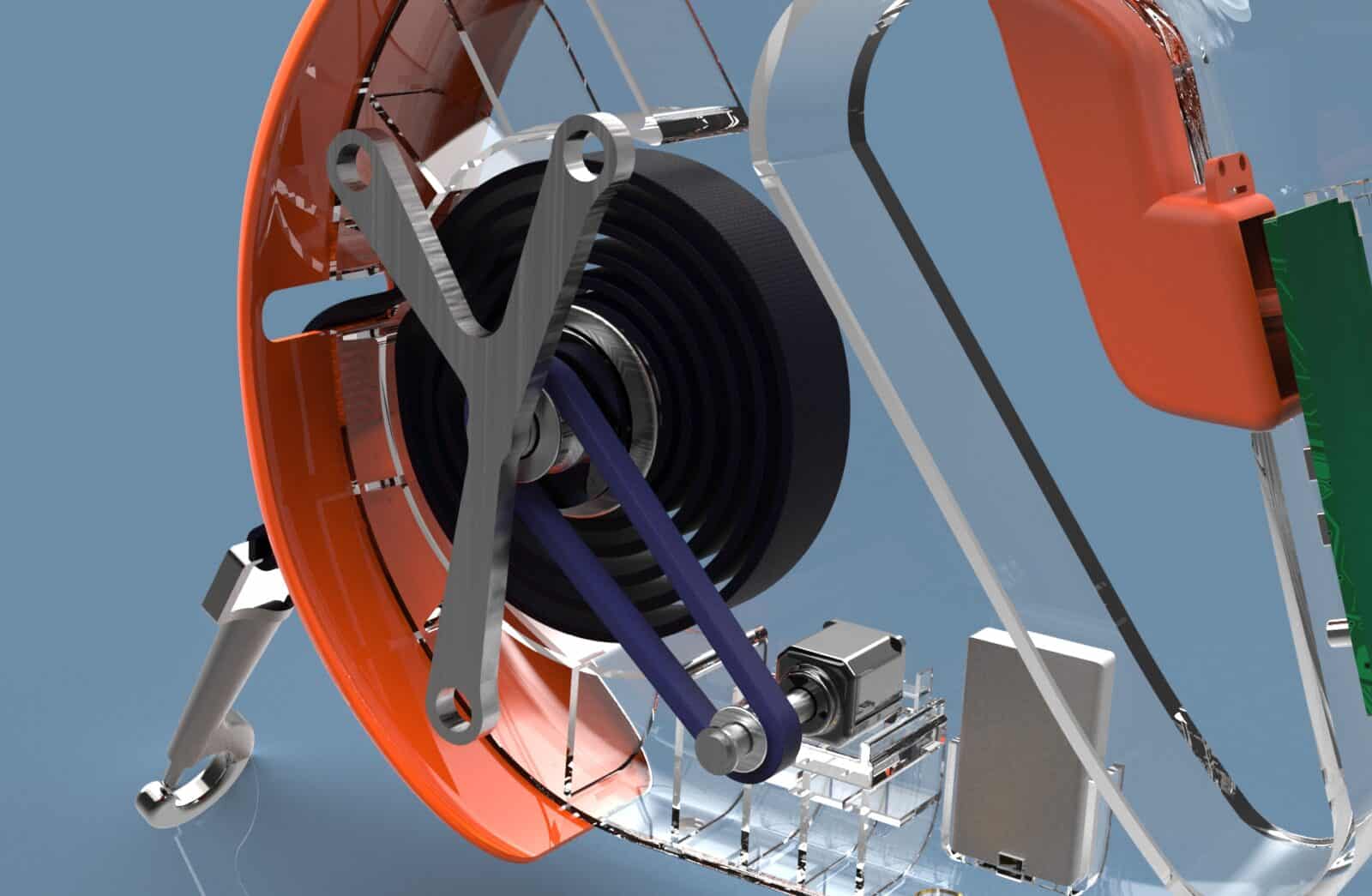
Two-Mode Pulley
A dual-mode pulley system manages both active and passive damping. When the user releases the trigger, the motor engages to absorb tension. It also allows for smooth, consistent retraction, maintaining a balance between control and comfort.
-
Control Trigger
Reactas trigger activates through a natural finger squeeze, momentarily releasing the lash to absorb force. The built-in on/off firmware distinguishes between short and long presses (1sec), intelligently switching modes to prevent accidental engagement.
-
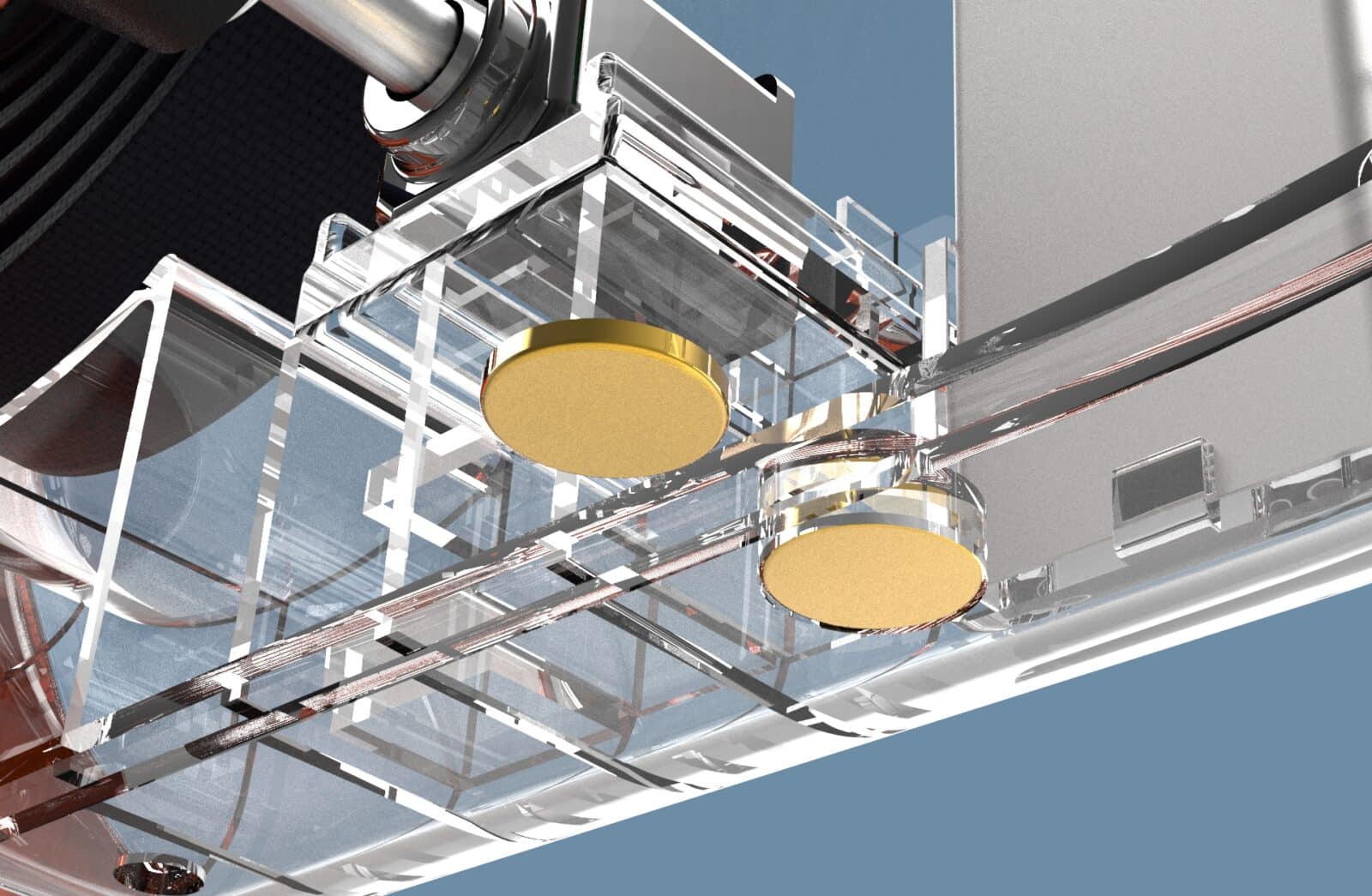
Magnetic Charging
Reacta charges via a magnetic dock fitted with pogo pin contact pads. The 5V battery in the dock connects through a USB-C outlet, ensuring a reliable and efficient charge every time. The auto-aligning design guides the handle into place effortlessly, combining simplicity, safety and technical precision.
-
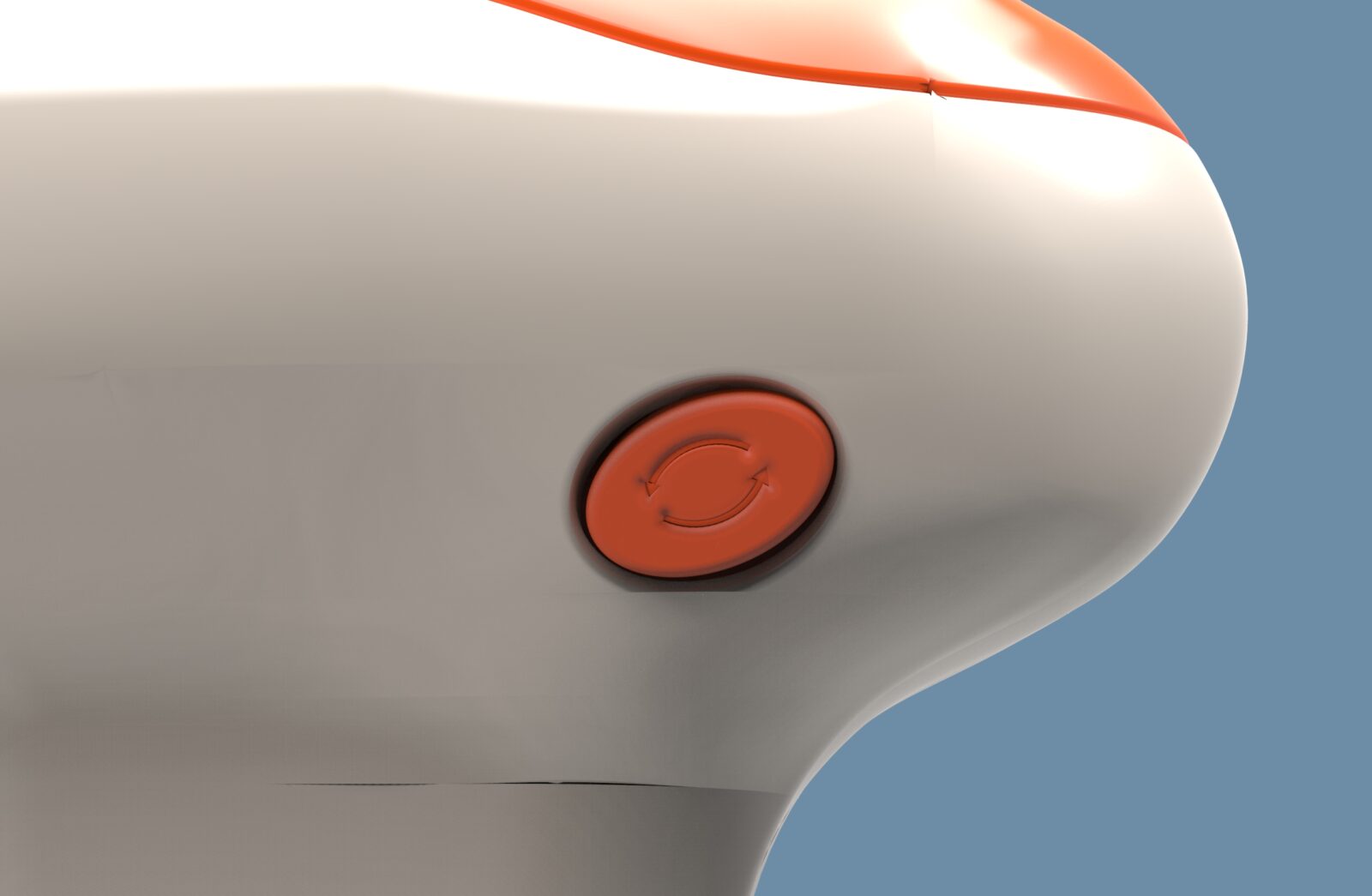
Retract Button
Positioned for ergonomic access, the retraction button offers smooth leash recall without resistance. It provides precision control during calm walks and fine adjustment during training or close-proximity moments.
-
Transparent Mechanism Cover
A transparent cover reveals the internal mechanism, instilling reassurance in the user. It visually communicates trust and reliability, letting users see how Reacta maintains control in real time.
-
Contoured Grip
The grip geometry supports the natural curvature of the hand, distributing pressure through the thenar web and palm. This design minimises wrist strain while maintaining a confident, stable hold for extended walking comfort.
what this means for users
Reacta changes how users experience control and safety. It softens unpredictable moments, making walks smoother, calmer and more confident for both user and their dog.
ECOSYSTEM
The magnetic dock keeps Reacta always ready to go, just drop it in, and it aligns, connects and recharges without thinking. It’s a small touch that makes every walk start seamlessly.
DESIGN THAT MAKES A DIFFERENCE
-
Empowerment Through Design
Reacta gives back confidence to those who’ve lost it. It removes fear from routine, allowing users to rediscover freedom in movement. No more hesitation, just balance, trust and genuine independence.
-
Human-Dog Connection Rebuilt
By reducing the strain of reaction, Reacta enhances the emotional link between person and pet. Walks become less about control and more about companionship, strengthening the bond between dog and owner.
-
Accessible Innovation
Reacta redefines inclusivity not as an adaptation, but as the starting point. It acknowledges diverse needs (age, ability, confidence) and designs for them first, setting a new standard for assistive everyday products.
-
Shifting Everyday Safety
Sudden motion is one of the most common causes of falls and wrist injuries in dog walking. Reacta turns those split seconds into stability, protecting the body while giving peace of mind with every step.